具身智能的Skill时刻!英伟达开源机器人技能库,Jim Fan:范式变了
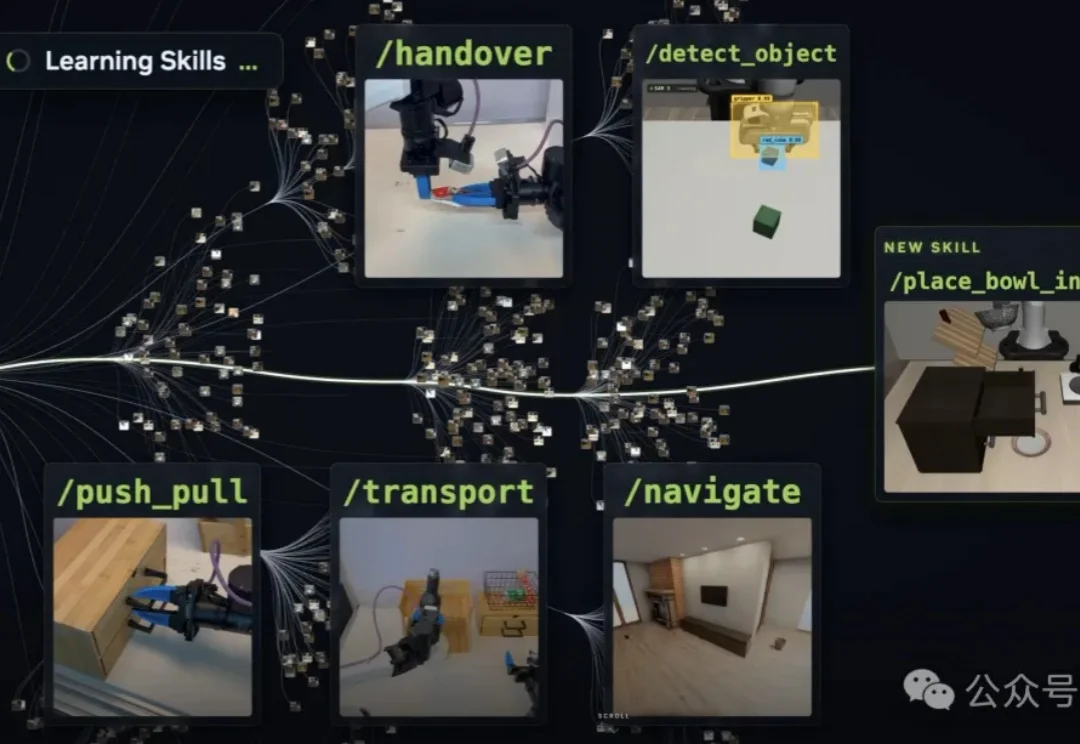
具身智能的Skill时刻!英伟达开源机器人技能库,Jim Fan:范式变了6!机器人也能学Skill了。
来自主题: AI技术研报
6391 点击 2026-07-02 11:06
 搜索
搜索
6!机器人也能学Skill了。
Jim Fan 押注的这条 “先预测世界,再生成动作” 的新路,正是当下具身智能领域最炙手可热的下一代范式 —— 世界动作模型(World Action Models,简称 WAM)。虽然 WAM 正在迅速成为各大顶尖实验室的核心发力点,但业界至今仍然缺乏对它的统一标准和系统梳理。近期,复旦大学可信具身智能研究院,上海创智学院,新加坡国立大学发表了首篇 WAM 的详细综述。
Jim Fan 在红杉资本 AI Ascent 最新观点,信息量极大,机器人物理AI很快就会迎来突破,答案就在视频模型,路径就是LLM的突破路径,Jim Fan把机器人的未来路线图比作文明游戏里的科技树,还剩三个成就要解锁,2040年就是终局

英文达杰出科学家Jim Fan表示,我正全身心投入一个单一使命:为机器人解决「Physical Turing Test」(物理图灵测试)。 这是AI的下一个挑战,甚至可能是「终极挑战」。

Jim Fan,英伟达机器人部门主管和杰出科学家、GEAR 实验室联合领导人、OpenAI 的首位实习生,最近在红杉资本主办的 AI Ascent 上做了一场 17 分钟的演讲
10个AI领域,50篇精品论文,每周看一篇,到2026就能成「AI工程」专家!
最近,Jim Fan参与的一项研究推出了自动化数据生成系统DexMimicGen。该系统可基于少量人类演示,合成类人机器人的灵巧手运动轨迹,解决了训练数据集的获取难题,而且还提升了实验中机器人的表现。
来自英伟达、CMU、UC伯克利等的全华人团队提出一个全新的人形机器人通用的全身控制器HOVER,仅用一个1.5M参数模型就可以控制人形机器人的身体。人形机器人的运动和操作之前只是外表看起来类人,现在有了HOVER,连底层运动逻辑都可以类人了!

具身化AI的未来突破“GPT-3时刻”;三类数据策略,互联网、模拟和真实机器人数据的结合;虚拟世界与现实世界的连接,基础Agent的愿景

在AI的世界里,模型的评估往往被看作是最后的「检查点」,但事实上,它应该是确保AI模型适合其目标的基础。